Ученые заставили робота вставать на цыпочки
И прыгать в высоту.
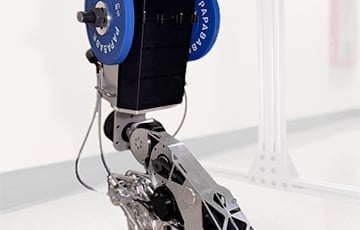
Американские инженеры разработали одноногого робота StaccaToe на основе робоноги, имитирующей анатомию человека. Нога имеет подвижный голеностопный сустав с двумя степенями свободы и стопу с отклоняемым мыском. Расположенные в бедре актуаторы, приводящие суставы робота в движение через систему ремней и шкивов, могут действовать одновременно и за счет этого генерировать значительный крутящий момент, например, для выполнения прыжков. Исследователи провели эксперименты, демонстрирующие способность StaccaToe удерживать равновесие, стоя на цыпочках, и выполнять прыжки в высоту. Препринт статьи опубликован на сайте arXiv.org, пишет N+1.
На сегодняшний день инженеры научились создавать человекоподобных роботов, которые могут хорошо держать баланс при медленной ходьбе и достаточно уверенно передвигаются по разным типам рельефа. Тем не менее большинство из существующих моделей роботов-гуманоидов до сих пор уступают человеку в ловкости, скорости и динамике движений. Одна из причин связана с конструкцией ног. Она, как правило, упрощена и существенно отличается от анатомии человеческих конечностей, которые имеют подвижный голеностопный сустав с несколькими степенями свободы и сгибающуюся ступню с отклоняющимся мыском. Кроме этого, работающие совместно мышцы способны генерировать движения со взрывной динамикой, которые пока недоступны роботам.
Приблизить способности робоног к человеческим попытались инженеры из лаборатории робототехники IRIM lab Корейского института технологий и образования. Год назад они представили разработку под названием HyperLeg — робоногу, которая имитирует анатомию и возможности человеческой. При схожей с биологическим прототипом массе в 8 килограмм HyperLeg имеет подвижный голеностопный сустав с двумя степенями свободы и подвижную стопу с округлой пяткой и отклоняемым мыском.
Работу коллег продолжили американские инженеры под руководством Кима Дон Хёна (Donghyun Kim) из Университета Массачусетса в Амхерсте. Используя наработки предыдущей команды, они усовершенствовали конструкцию робоноги и создали на ее базе одноного робота StaccaToe для подробного изучения возможностей человекоподобной робоконечности. Робот имеет высоту 1,2 метра, массу — 16 килограмм и оснащен шестью электромоторами. Так же, как и в HyperLeg, моторы, отвечающие за движение коленного сустава, лодыжки и мыска установлены в бедре, а усилия на суставы передаются через ременные передачи, шкивы и тяги. Робот может поднимать носок ступни в направлении к голени, а голеностопный сустав отклоняет ступню не только в продольном, но и в поперечном направлении в обе стороны. Помимо бедра, голени, лодыжки, ступни и отклоняемого мыска, у StaccaToe есть также небольшое тело, в котором размещаются электронные компоненты и батарея.
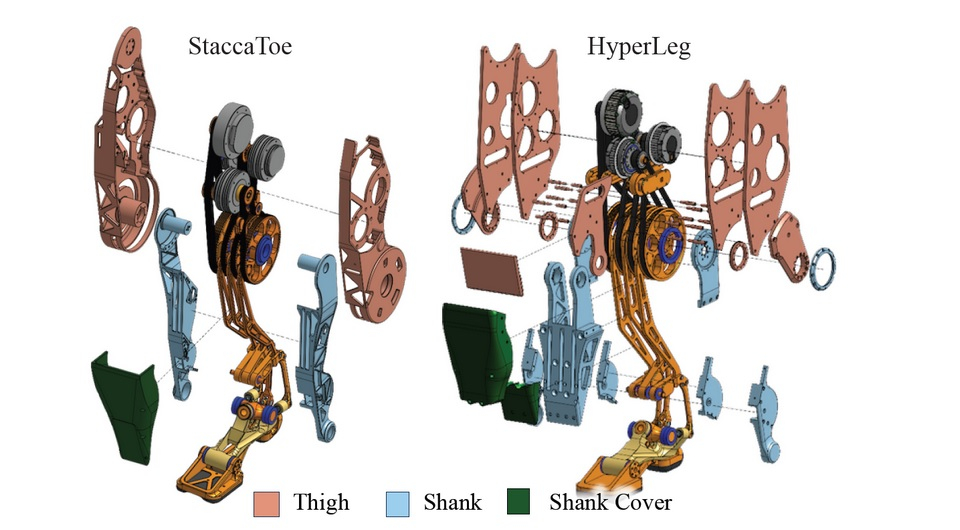
Инженеры провели тщательную ревизию количества деталей и оптимизировали их форму. В сравнении с оригиналом в бедре и голени StaccaToe стало меньше на 28 и семь деталей соответственно. Это позволило упростить сборку и повысить надежность робота. Изменение конструкции системы шкивов и оптимизация расположения компонентов привели к уменьшению ширины ноги. Масса была уменьшена на 15 процентов по сравнению с HyperLeg, что составило примерно 0,5 килограмма. При этом оптимизированные детали сохранили необходимую жесткость для обеспечения точного управления и стабильности робота.
В качестве бортового компьютера в роботе используется UP Xtreme Intel Core i7. Отслеживать положение в пространстве помогают инерциально-измерительные модули IMU. Плата управления моторами обеспечивает высокие токи при напряжении до 48 вольт, что дает необходимую мощность при пиковых нагрузках и позволяет генерировать резкие взрывные движения, необходимые для спринта и прыжков.
Чтобы протестировать возможности робота StaccaToe, разработчики выполнили два эксперимента. В первом StaccaToe поднимался из положения стоя на всей стопе, смещал центр массы вперед и затем переходил в положение стоя на носке, что доказало возможность поддержания устойчивого баланса робоноги в позе на цыпочках. Во втором случае робот успешно выполнил вертикальный прыжок, полностью оторвавшись от пола. Этот опыт показал высокую эффективность коактуации — одновременной совместной работы всех электромоторов, отвечающих за движения суставов. Коактуация позволила суставам сгенерировать значительно больший крутящий момент, чем при использовании отдельных приводов, что привело к более мощному отталкиванию от земли. Во время фазы отталкивания при прыжке коленный сустав с коактуацией смог генерировать крутящий момент более 100 ноютон-метров, что превышает возможности отдельного привода колена (80 Нм) примерно на 25%.
Полученные наработки инженеры планируют в будущем применить для создания нового двуногого человекоподобного робота PresToe. В перспективе он должен стать первым роботом-гуманоидом, который может не только ходить, но будет также способен бегать спринт и выполнять прыжки с высокой динамикой.

Один из немногих человекоподобных роботов, приближавшийся по динамическим возможностям к человеку — робот Atlas с гидравлическими актуаторами, созданный компанией Boston Dynamics, недавно был «отправлен в отставку». Компания отказалась от дальнейшей разработки гидравлической версии робота и представила Atlas нового поколения с электрическими актуаторами.
 20.05.2024
Почему президент Ирана летел на старом американском вертолете, хотя у него были новые московитские
20.05.2024
Почему президент Ирана летел на старом американском вертолете, хотя у него были новые московитские













 19.05.2024
Минтранс рассказал про ограничения на дорогах, ведущих к погранпереходам «Григоровщина» и «Бенякони»
19.05.2024
Минтранс рассказал про ограничения на дорогах, ведущих к погранпереходам «Григоровщина» и «Бенякони»
Новости и события в Беларуси и мире.
Пресс-центр [email protected]