Конструкцию гибких роботов подсмотрели у одноклеточных
Исследователи из Испании и Италии предложили использовать для работы внутри человеческого тела гибких микророботов. Принцип перемещения этих роботов ученые хотят заимствовать у одноклеточных организмов, эвглен. Подробности со ссылкой на статью ученых в журнале Journal of the Mechanics and Physics of Solids приводит официальный сайт Международной школы перспективных исследований SISSA.
Авторы проекта пишут, что к работающему внутри человеческого тела роботу предъявляется ряд специфических требований. Такие устройства должны быть лишены острых углов, а их материалы должны быть химически инертны. Кроме того, решение многих медицинских задач (например, адресная доставка лекарства к очагу патологического процесса) требуют миниатюризации, а она приводит к снижению эффективности многих обычных механизмов. По мнению ученых, робот, построенный по аналогии с эвгленоидеями (у которых основной способ передвижения основан на биении жгутиков, но которые также умеют менять свою форму) может быть уменьшен до требуемых размеров и при этом допускает изготовление из удовлетворяющих медиков материалов.
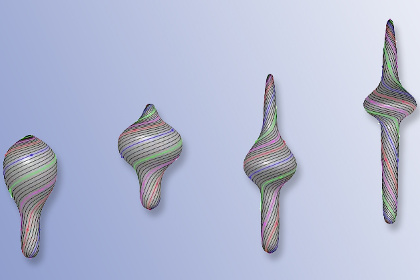
Обтекаемый корпус робота предполагается изготовить из материала, который способен сокращаться по команде системы управления. Если сокращающиеся элементы (аналог мышечных волокон) расположить не вдоль продольной оси, а под углом к ней, то это, как показали исследователи, обеспечит возможность произвольно менять форму поверхности. Создав на веретенообразном корпусе кольцеобразный выступ и перемещая его вперед или назад, робот сможет передвигаться в нужном направлении.
Детали конструкции при этом авторы нового исследования пока не описывают. Действующие модели подобных микророботов пока не созданы. Статья содержит теоретические расчеты, которые показывают принципиальную возможность управлять формой робота при помощи сокращающихся элементов, которые изначально размещены на сфере, цилиндре или иной поверхности. Создание реальных медицинских роботов потребует решения еще ряда проблем, к которым относится разработка системы управления, компактного источника питания и позволяющих ориентировать внутри человеческого тела сенсоров. При этом неавтономные хирургические роботы уже существуют. Они позволяют подобраться к месту операции через небольшой разрез и пропорционально уменьшать движения рук хирурга для более точных манипуляций.










 26.04.2024
Редкое предложение: в центре Витебска продается новый коттедж прямо на берегу Западной Двины
26.04.2024
Редкое предложение: в центре Витебска продается новый коттедж прямо на берегу Западной Двины




Новости и события в Беларуси и мире.
Пресс-центр [email protected]